My first bat detector

During the summer season bats fly around almost every day in the twilight. I spot them in the evening, when they fly along our house and hunt for small flying insects, mostly mosquitoes and flies. Their soundless air show is a joy to watch.
One of the interesting things about bats is that they use echo location (radar) to find insects. They produce ultrasonic sounds and are able to detect reflections and determine whether the reflection is produced by something digestible. This sound cannot be heard by humans: bats generate sounds somewhere between 25 and 160 kHz, while our ears cut off at about 20 kHz (our cut-off frequency tends to lower when you’re becoming older).
I’ve heard and read about so-called ‘bat detectors’, which are devices that allow you to hear those bat sounds. Looking around at the internet there are lots of pages telling you about different ways to bring back bat chirps to our audio spectrum. So I start with a quick summary down here.
Bat detector types
The heterodyne detector mixes down the received signal to (human readable) audio. There are different techniques to achieve this, most of them are very similar to CW/SSB radios, so think about circuits based on direct conversion, super-heterodyne and regeneration. Those detectors can be highly sensitive, but since the frequency range is over 100 kHz you will not be able to hear the full signal.
The frequency division detector amplifies the signal to a level that is high enough to trigger the clock input of a binary frequency counter/divider chip (e.g. CD4024). If you divide the signal by 16, the result is that a chirp of 48 kHz now sounds like chirp of 3 kHz. So the good thing is that everything of the signal can be heard now, however dynamics (amplitude) are removed so all signals sound at the same audio level.
The time expansion detector records the received signal and plays it back at a lower rate. The good thing is that you have a full range receiver that also allows you to hear the dynamics, but the output is delayed so you don’t have a real time experience. Still, it is probably the best way to determine different bat species.
Apart from the detection type, it is also interesting to know that the sensitivity and frequency range are highly depending on the type of ultrasonic transducer/microphone. This webpage gives more background on the different ways to pick up ultrasonic sounds by using piezo sensors, capacitance microphones, electrets and MEMS. This website provides some sound samples as well, demonstrating the different detection types.
The three detection types mentioned encouraged me to start three new home brew projects. Since I’m rather new into bat detectors, I decided to go for the easiest one to build first: the frequency division bat detector. This will provide a quick result (hopefully), which helps me to decide building a more complex one (or not).
Building my first bat detector
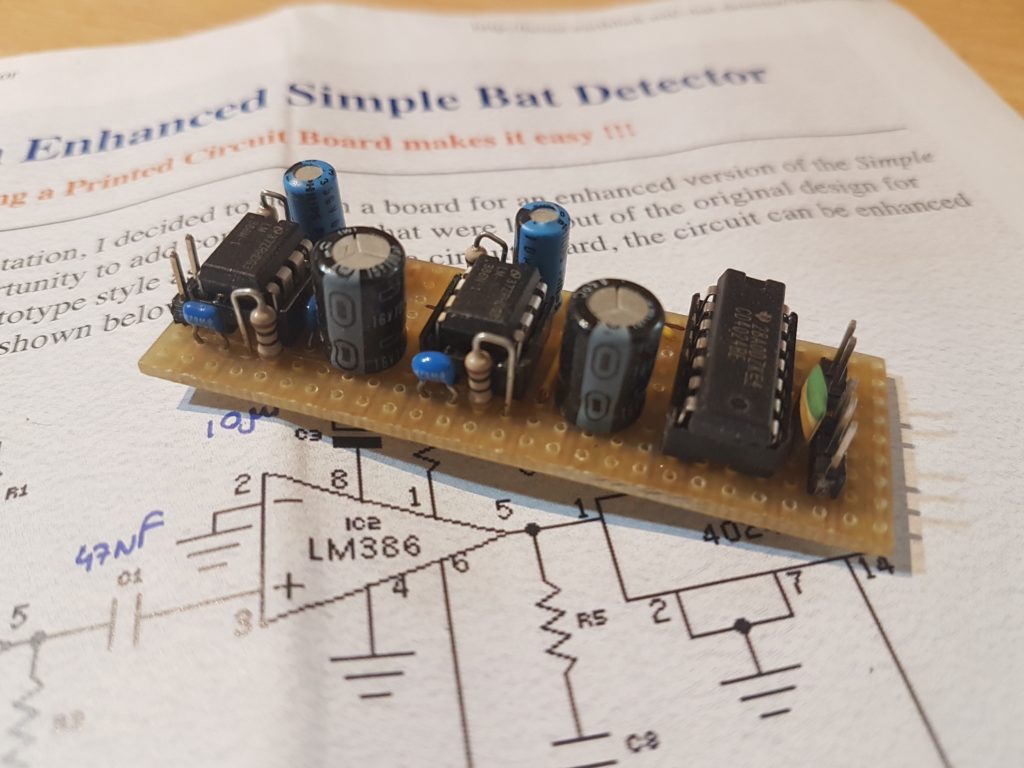
I found this old but interesting website of Tony Messina, including the circuit shown here:
The circuit is rather straightforward: the ultrasonic sensor is hooked up to pin 3 of the first LM386 amp by means of a decoupling capacitor. The gained output signal is fed into another LM386, applying more gain to the signal, resulting in a capped signal which has a more or less square shape. This signal is good enough to clock the CD4024 binary counter. Output Q4 on pin 6 generates a frequency which is 16 times lower than the clock input. The output level is more than enough to drive a good old crystal earpiece.
I soldered all the components on a piece prototype board. I was first thinking on building a very small device, so I put some effort in getting a really small board. However, when all components were in place and wired, I found out that I forgot to reserve some space for screw holes. Meanwhile I found a box which includes a 9V battery holder, however it is a bit larger than planned. I ended up by 3D-printing a plane that can be screwed in the box and that holds the circuit board by means of a few clips; I’m actually quite fond of the result!
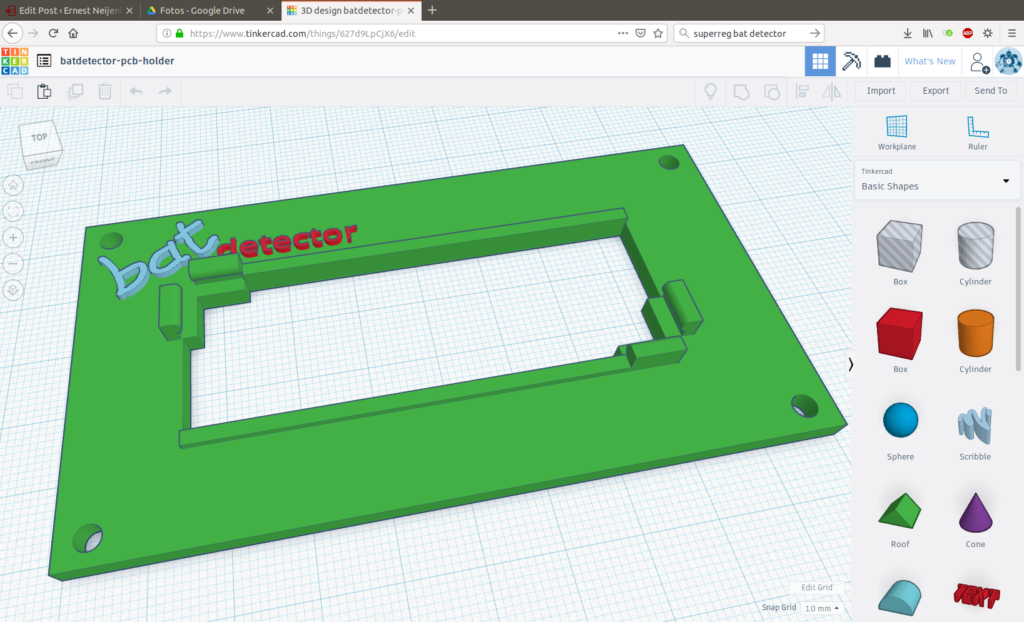
3D-design of the circuit board holder in Tinkercad. Notice the clips in the corners, these hold the board in place. 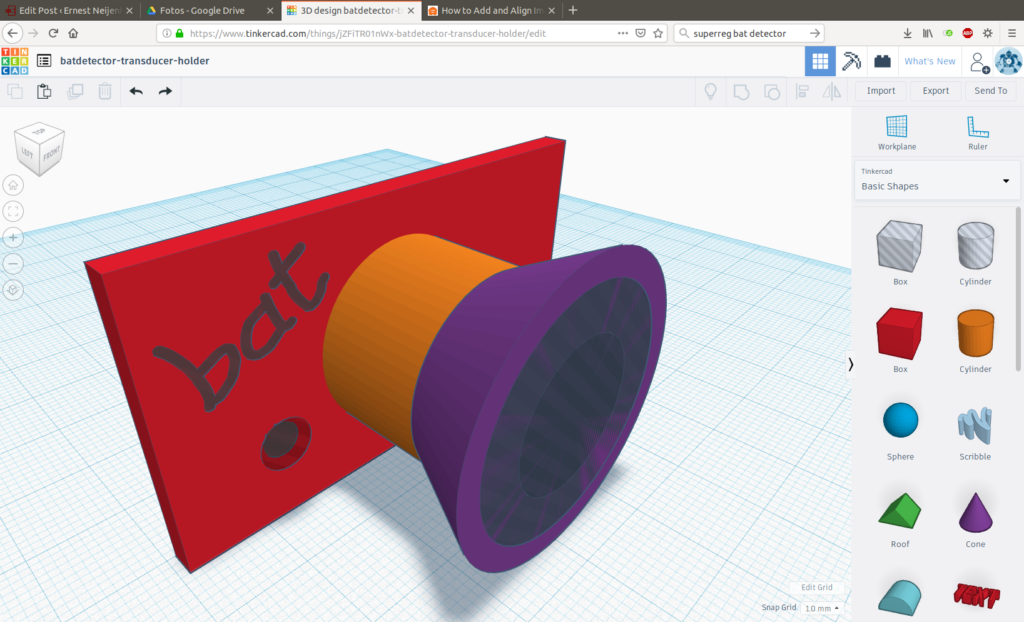
3D-design of the transducer holder. The entrance is cone shaped, although I’m not sure if this would impact the directivity, but at least it looks cool 🙂 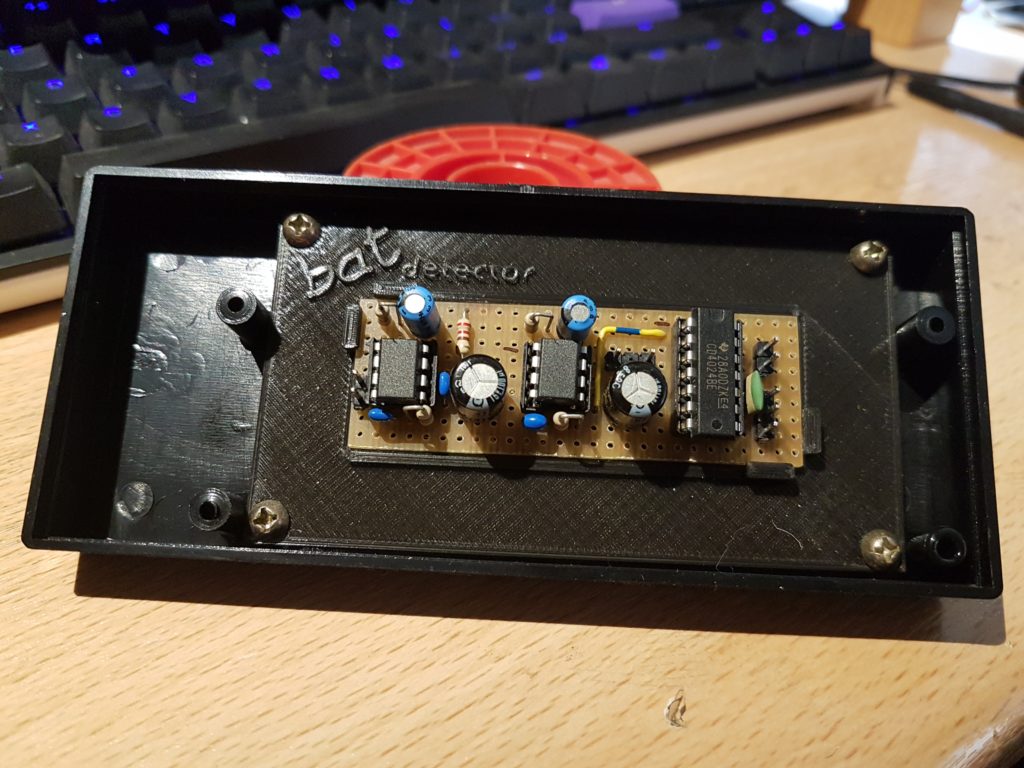
The printed holder with the board inserted, screwed into the case. 
Almost finished, later I added a push button switch to enable the battery power.
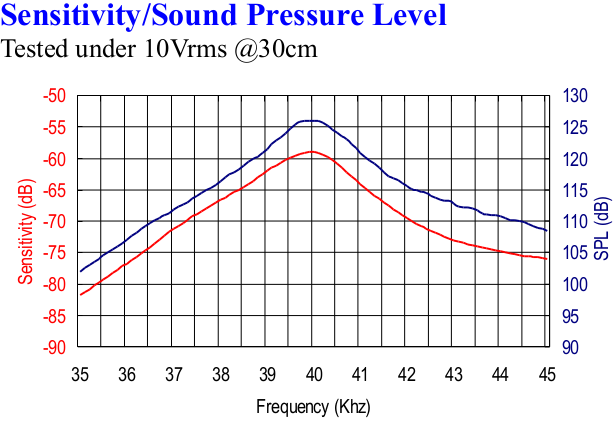
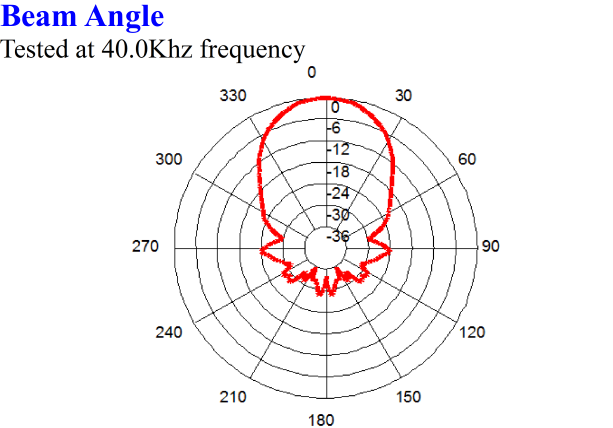
I also 3D-printed a holder for the ultrasonic transducer. I once bought a bunch of 400SR160 piezo sensors, since building a bat detector was in my mind for quite a long time. Nowadays I learned these sensors are sub-optimal, since they have a very limited frequency range of about 2.5 kHz. Still, they seem to be used quite often in bat detectors, so I decided to give it a try. Some more numbers: the center frequency is 40 kHz, while the radiation pattern shows a beam width of 55 degrees. Down here are two graphs from the 400SR160 datasheet to illustrate these numbers:
To test the device I needed a source of ultrasonic sound. There are a few in each home, one of them being the water tap in the kitchen. when the water is running through the aerator, it produces a ultrasonic hiss. Also, very thin plastic produces ultrasonic sounds when wrapping. Both tests worked with my detector!
First impressions
Now the detector is finished, it was time to put it to the test. The first evening however the weather was not great, with a bit of a drizzle. The second evening it was dry and nice weather, and while walking the dog I noticed two bats flying around. I immediately went back inside to grab my detector and a moment later the first chirps came out of the earpiece. What a relief!
I don’t know the species of bats flying around, but they produce a pulsating sound of a few hertz, increasing when aiming at an insect. The two bats produced about the same sound, but when listening carefully you could determine individual differences. I live near an old fortress where different species of bats live, I plan to go there to see if I can determine those different species by identifying their sound.
The sensitivity is not that great; the range is maybe 5 meters, and I have to point the detector towards the bat. Still it is a small wonder to hear these chirps from animals that seemed to be so quiet until now 🙂
Ernest ,je hebt een mooie web site met interessante onderwerpen . Uiteraard heb ik jouw site in een file .
Heb zelf geen site ,en kijk veel op Pinterest .
Ben sinds 1974 lid van VERON ,maar vind Electron tegenwoordig nogal saai .
Geef de voorkeur aan DARU Magazine (ben ook lid van DARU and BQRP Club)
Succes met je hobbies
73 , Frank , EI7KS (ook nog GM0CSZ en KN6WH)